Chapter 4 스택
스택
스택이란, 쌓아놓은 더미를 의미한다.
스택의 특징, 후입선출(LIPO: Last-in First-out)
가장 최근에 들어온 데이터가 가장 먼저 나간다.
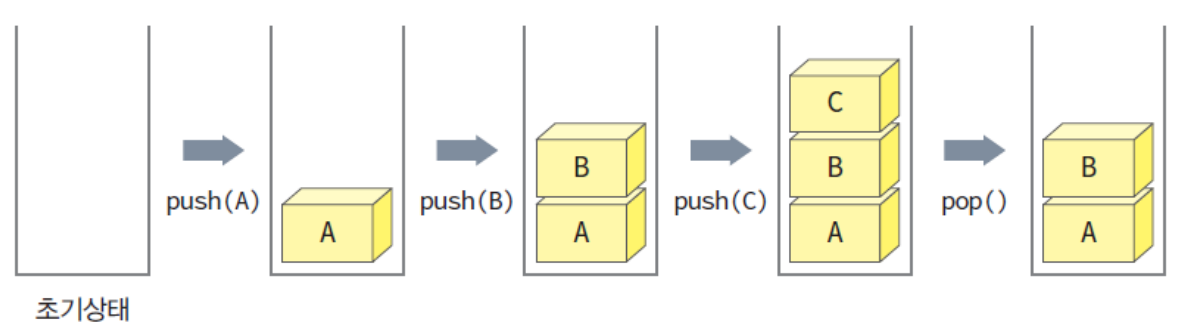
push()에 데이터를 쌓고, pop()에 내보내고 있다.
이를 코드로 나타내면 아래와 같다.
#include <stdio.h>
int stack[5];
int top = -1;
int isEmpty(){
return (top == -1);
}
int isFull(){
return (top == 4);
}
void push(int value){
if (isFull() > 0)
{
return; // 꽉 찼으면 못 넣는다.
}
top++;
stack[top] = value;
}
int pop(){
if (isEmpty() > 0)
{
return -999; // 비어있다는 의미로 -999 반환
}
int result = stack[top];
top--;
return result;
}
int main(){
return;
}
스택의 활용
스택을 이용하면 후위계산식을 풀이하거나, 괄호를 짝지어 체크하는 문제 등 스택의 특성을 이용해 다양한 문제를 효과적으로 풀이 가능하다.
아래는 스택으로 백트래킹으로 길찾기 알고리즘을 구현해 미로 만들기 문제를 풀이하겠다.
미로만들기
다음 조건을 만족하며, 문제를 풀어보자.
- 미로의 크기 n 입력 받기 (n >= 5, n <= 30)
- 미로의 표기: 1은 벽 0은 통로
- 시작지점은 (0,0), 도착지점은 (n-1, n-1)
- random 함수를 이용해 벽을 임의의 위치에 생성
- 미로 길찾기 알고리즘을 이용해 경로 파악
- 경로가 있으면 4번 / 없다면 4번에서 만든 벽을 지우고 다시 4번
- (n * n)의 미로의 70% 이상이 벽이 될 때까지 위 과정 반복.
- 미로 완성본 출력
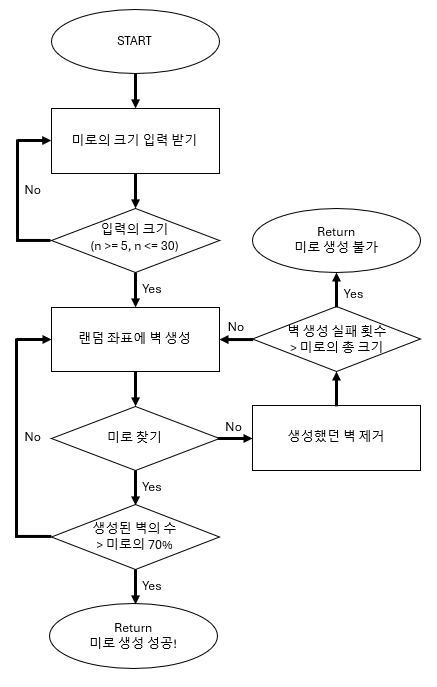
과정을 플로우 차트로 간단하게 그리면 다음과 같다.
입력받기
문제를 풀기 위해 먼저 입력을 받아야 한다.
입력은 (n >= 5, n <= 30)으로 사용자에 따라 바뀌기 때문에 이전 챕터에 나왔던 동적할당을 이용하겠다.
// 좌표 정보를 나타내는 구조체
struct COORD{
int row;
int col;
};
struct COORD path_stack = NULL; // 스택(경로 저장)
struct COORD visited = NULL; // 방문한 좌표 저장
int **maze = NULL; // 미로
int top = -1; // path_stack의 top
int visitedIndex = -1; // visited의 index
int size = 0; // 미로의 크기 ( size * size )
int wallcount = 0; // 생성된 벽의 수
int main() {
scanf("%d", &size);
struct COORD start_point = { 0, 0 }; // 시작지점
struct COORD dest_point = { size - 1, size -1 }; // 종료지점
// 미로와 문제풀이에 사용할 스택과 배열 동적할당.
maze = (int **)malloc(size * sizeof(int *));
for (int i = 0; i < size; i++)
{
maze[i] = (int *)malloc(size * sizeof(int));
}
path_stack = (struct COORD *)malloc(size * size * sizeof(struct COORD));
visited = (struct COORD *)malloc(size * size * sizeof(struct COORD));
// 랜덤 시드 값
srand(time(NULL));
// 미로 초기화 모두 0으로
for (int i = 0; i < size; i++)
{
for (int j = 0; j < size; j++)
{
maze[i][j] = 0;
}
}
// 동적할당 해제
for (int i = 0; i < size; i++)
{
free(maze[i]);
}
free(maze);
free(path_stack);
free(visited);
return 0;
}
동적할당을 통해 미로의 크기를 받아 사용할 변수들에 크기를 선언해주었다.
미로를 더블 포인터가 아닌 싱글 포인터로 maze = (int *)malloc(size * size * sizeof(int));로 사용가능하지만 그렇게하면 이후에 maze(row * size + col)같은 형태로 사용해야 해서 더블 포인터를 이용해 2차원 배열처럼 만들어 주었다.
미로 길찾기 알고리즘
우리가 가장 쉽게 생각할 수 있는 미로의 길 찾기는 한칸씩 움직이며 3가지를 고려하는 것이다.
지도 영역 내인지? 벽이 있는지? 이미 가본 적 있는 길인지? 이 세 가지를 4방향으로 고려해보자.
상하좌우를 각각 3가지를 고려한다면, 다음에 어떤 위치로 가야하는지 알 수 있다.
이를 코드로 표현하면 다음과 같다.
// 스택 관련 함수
int isStackEmpty(){
return (top == -1);
}
int isStackFull(){
return (top == (size * size - 1));
}
void push(struct COORD _c){
if (isStackFull())
{
return;
}
top++;
path_stack[top] = _c;
return;
}
struct COORD pop(){
struct COORD result = { -1, -1 };
if (isStackEmpty())
{
return result;
}
result = path_stack[top];
top--;
return result;
}
// peek (pop과 유사하지만 실제로 pop은 하지 않고 맨 위의 값을 보기만 함.)
struct COORD peek(){
struct COORD result = { -1, -1 };
if (isStackEmpty())
{
return result;
}
result = path_stack[top];
return result;
}
// 길찾기 관련 함수
// 좌표 _c를 방문했었는지 판단
// 했었으면 1 아니면 zero
int checkVisited(struct COORD _c){
for (int i = 0; i <= visitedIndex; i++)
{
if (visited[i].col == _c.col && visited[i].row == _c.row)
{
return 1;
}
}
return 0;
}
void addToVisited(struct COORD _c){
// 있는지를 검사한다.
// 없으면 추가한다. 이때 인덱스를 먼저 증가시킨다.
if (checkVisited(_c) == 0){
visitedIndex++;
visited[visitedIndex] = _c;
}
}
// _c가 _dst와 같은지 판단.
// 같으면 non-zero를 반화, 아니면 0을 반환
int checkDestination(struct COORD _c, struct COORD _dst){
return (_c.row == _dst.row && _c.col == _dst.col);
}
// _c가 영역 내에 있으면 1, 아니면 0
int isWithinMap(struct COORD _c){
return ((_c.row >= 0) && (_c.row < size) && (_c.col >= 0) && (_c.col < size));
}
int isWall(struct COORD _c){
return (1 == maze[_c.row][_c.col]);
}
// _c를 기준으로 갈 수 있는 좌표 1곳을 반환
// 만약 없으면 (-1, -1) 반환
struct COORD findWhereToGo(struct COORD _c){
// 체크할 방향을 저장하는 변수
struct COORD target;
// 1. 지도 영역 내인가?
// 2. 벽인가?
// 3. 가본 적 있나?
// 위
target.row = _c.row - 1;
target.col = _c.col;
if (isWithinMap(target) == 1 && isWall(target) == 0 && checkVisited(target) == 0)
{
return target;
}
// 아래
target.row = _c.row + 1;
target.col = _c.col;
if (isWithinMap(target) == 1 && isWall(target) == 0 && checkVisited(target) == 0)
{
return target;
}
// 왼쪽
target.row = _c.row;
target.col = _c.col - 1;
if (isWithinMap(target) == 1 && isWall(target) == 0 && checkVisited(target) == 0)
{
return target;
}
// 오른쪽
target.row = _c.row;
target.col = _c.col + 1;
if (isWithinMap(target) == 1 && isWall(target) == 0 && checkVisited(target) == 0)
{
return target;
}
target.row = -1;
target.col = -1;
return target;
}
// _s에서 _d까지 경로를 출력하는 함수
void findPath(struct COORD _s, struct COORD _d, struct COORD _wall){
// 현재 위치를 설정
struct COORD current = _s;
// 출발 좌표 저장
addToVisited(current);
while(1)
{
// 현재 위치에서 가는 곳을 찾는다.
struct COORD whereToGO = findWhereToGo(current);
if (whereToGO.row != -1 && whereToGO.col != -1)
{ // 갈 곳이 있음
push(current); // 경로를 저장해 둔다.
current = whereToGO; // current는 항상 현재 위치를 표시
addToVisited(current); // 내가 여기 왔다고 표시
if (checkDestination(current, _d) == 1)
{
// 도착. stack에 들어있는 경로 출력
// 이후 미로 만들기에서는 수정될 부분.
for (int i = 0; i <= top; i++)
{
printf("( %d, %d )\n", path_stack[i].row, path_stack[i].col);
}
printf("목적지 도착! (%d, %d)\n", current.row, current.col);
return;
}
}
else
{ // 갈 곳이 없음
while (1)
{
// top_coord <= stack의 맨 위에 있는 곳을 peek
struct COORD top_coord = peek();
// top_coord (-1, -1) : stack이 비었음... 경로 없음
// 더 이상 돌아갈 곳이 없음. 프로그램 종료.
if (top_coord.row == -1 && top_coord.col == -1)
{
// 이후 미로 만들기에선는 수정될 부분.
printf("경로가 없습니다.\n");
return;
}
whereToGO = findWhereToGo(top_coord);
if (whereToGO.row == -1 && whereToGO.col == -1)
{
// findWhereToGo(top_coord) => (-1, -1)
// 이 좌표는 도움이 안됨. 더 이전으로 가야함. 이 좌표는 버림
pop(); // top_coord를 날려버림.
}
else
{
// findWhereToGo(top_coord) => 유효한 좌표 찾기 성공
// current = whereToGo
// push가 필요 없음, 아직 top_coord가 스택에 존재하기 때문.
// addToVisited(current)
current = whereToGO;
addToVisited(current);
break;
}
}
}
}
}
스택 관련 함수
isStackEmpty: 스택이 비어있는지 확인하는 함수.
isStackFull: 스택이 가득 차있는지 확인하는 함수.
push: 스택에 값을 넣어주기 위한 함수.
pop: 스택에 값을 제거하기 위한 함수.
peek: pop과 비슷하지만, 제거하지않고 위의 값을 보기만 하는 함수.
길찾기 관련 함수
checkVisited: 좌표를 방문했는지 확인하는 함수.
ddToVisited: 방문한 좌표를 visited배열에 추가하는 함수.
checkDestination: 도착 위치에 도달했는지 확인하는 함수.
isWithinMap: 미로 영역 내에 존재하는지 확인하는 함수.
isWall: 벽인지 아닌지 확인하는 함수.
findWhereToGo: isWithinMap, isWall, checkVisited를 이용해 상하좌우 좌표에 대해 갈 수 있는지 확인하는 함수.
findPath: 길찾기 관련 함수들과 스택 관련 함수들을 이용해 실제로 시작 위치에서 도착 위치까지 도달할 수 있는지 확인하는 함수.
지금은 경로를 출력하고 있지만 이후 미로 만들기에서는 벽을 생성하는 함수로 변경할 예정.
길찾기 함수를 갈 수 있는 좌표를 찾고, 없다면 스택을 이용해 백트래킹으로 돌아와 다시 좌표를 찾을 수 있다.
이 코드를 통해 우리는 시작 위치에서 도착 위치까지의 경로를 찾을 수 있다.
벽 생성
랜덤한 위치에 벽을 생성해야되기 때문에 rand()함수와 시드값으로 time() 함수를 쓰기 위해 #include <stdlib.h>와 #include <time.h>을 추가하고, 랜덤하게 벽을 생성해주었다.
// 벽 생성 관련 함수
// 생성된 벽이 중복인지 확인. 같은 벽이면 1, 아니면 0
int check_create_wall(struct COORD _wall){
if (maze[_wall.row][_wall.col] == 1){
return 1;
}
else
{
return 0;
}
}
// 랜덤한 위치에 벽을 하나 생성.
struct COORD create_wall(){
struct COORD wall;
// 0 ~ size -1 까지 중에 랜덤
wall.row = rand() % size;
wall.col = rand() % size;
while (1)
{ // 이미 생성된 벽이거나 출발 위치이거나 도착 위치인 경우, 재생성.
if (check_create_wall(wall) == 1 || (wall.row == 0 && wall.col == 0) || (wall.row == size - 1 && wall.col == size - 1))
{
wall.row = rand() % size;
wall.col = rand() % size;
}
else
{ // 벽 생성
maze[wall.row][wall.col] = 1;
wallcount++;
break;
}
}
return wall;
}
벽 생성 관련 함수
check_create_wall: 벽이 중복인지 아닌지 확인하는 함수.
create_wall: 랜덤한 위치에 벽을 생성하는 함수.
문제점 수정
70% 이상의 벽을 생성하는데에 있어. $5 * 5$와 $6 * 6$ 사이즈는 말이 안된다.
$5 * 5$ 의 70%는 $17.5$로 $17.5$ 이상 벽을 세운다면 $18$개 이상을 세워야 한다.
그런데 $5 * 5$일때 최소한의 이동은 가로로 5번 세로로 4번 움직인 9번의 움직임이 필요하다.
$18 + 9$ 는 $27$로 $5 * 5$ 배열의 개수인 25를 넘어버린다.
$6 * 6$ 사이즈의 미로 역시 마찬가지이다.
$6 * 6$ 사이즈의 미로에서 70%는 $25.2$로 $25.2$ 이상의 벽을 세운다면 26개 이상 세워야 한다.
미로의 최소 이동 수는 $6 + 5$로 $11$ 이므로 $26 + 11 \neq 6 * 6$ 이다.
따라서 $5$와 $6$인 경우 미로를 만들 수 없다.
문제를 해결하기 위해 이동을 위한 최소한의 개수를 뺀 $((size * size) - size + size - 1)$만큼의 벽을 세우고,
failcount를 만들어 $size * size$번(충분히 많은 실패 횟수동안) 경로를 찾지 못하면,
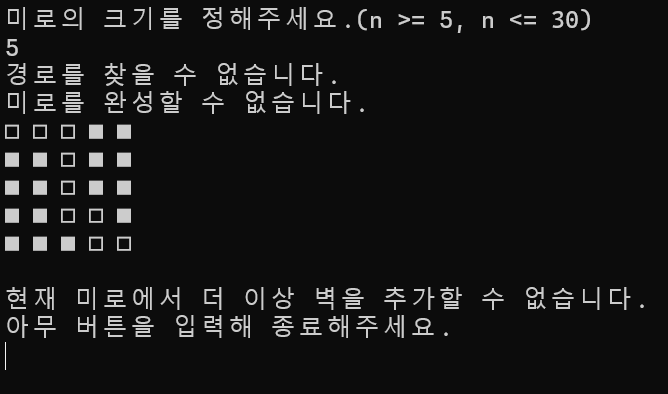
더이상 벽을 세울 수 없기에 “경로를 찾을 수 없습니다.” 메세지를 띄우게 하였다.
7인 경우에도 벽이 확률적으로 경로를 ‘ㄷ’자로 꼬아서 최소 이동횟수로 움직을 수 없는 경우, 70%의 벽 생성이 불가능하다.
따라서 충분한 실패가 이어진다면 미로 만들기를 재시작하도록 변경하였다.
최종 코드
아래는 최종코드이다.
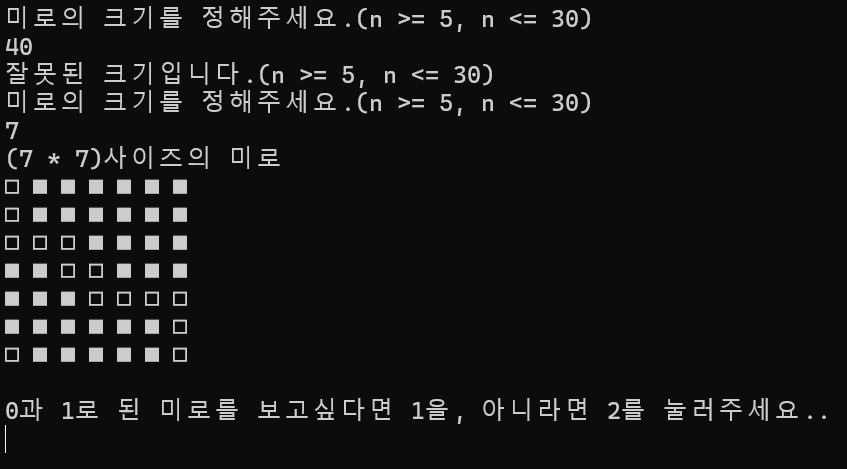
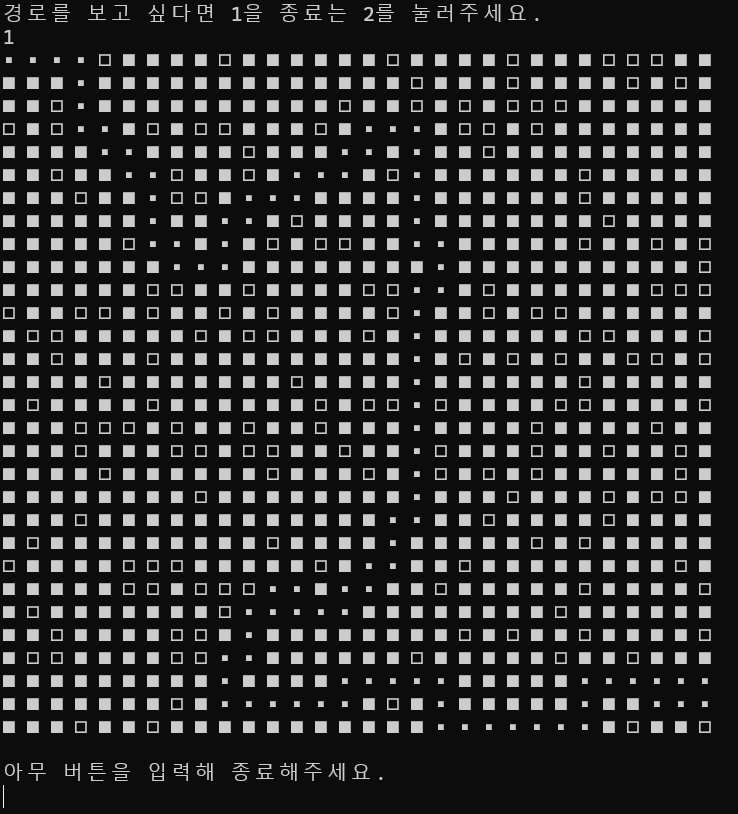
통로는 ‘⬜’, 벽은 ‘⬛’, 경로는 ‘▪️’로 표시했다.
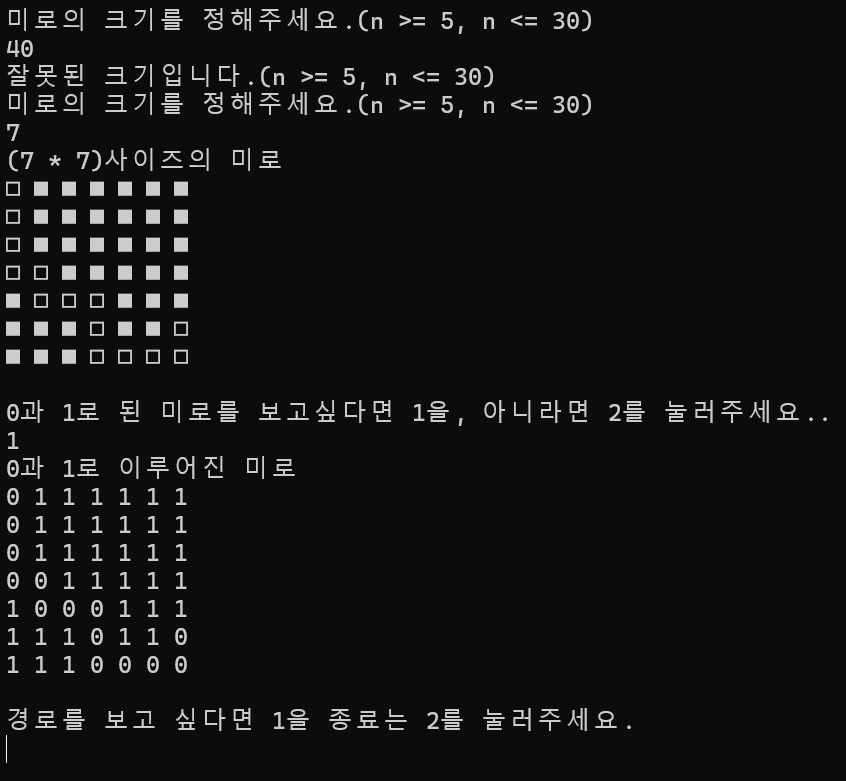
이후 0과 1로 된 맵을 보고싶으면 1을, 경로를 보고싶으면 다시 1을 누르면 된다.
#include <stdio.h>
#include <stdlib.h>
#include <time.h>
// 좌표 정보를 나타내는 구조체
struct COORD{
int row;
int col;
};
struct COORD *path_stack = NULL; // 스택(경로 저장)
struct COORD *visited = NULL; // 방문한 좌표 저장
int **maze = NULL; // 미로
int top = -1; // path_stack의 top
int visitedIndex = -1; // visited의 index
int size = 0; // 미로의 크기 ( size * size )
int wallcount = 0; // 생성된 벽의 수
int failcount = 0; // 5와 6를 걸러내기 위한 경로탐색실패 카운트
// 스택 관련 함수
int isStackEmpty(){
return (top == -1);
}
int isStackFull(){
return (top == (size * size - 1));
}
void push(struct COORD _c){
if (isStackFull())
{
return;
}
top++;
path_stack[top] = _c;
return;
}
struct COORD pop(){
struct COORD result = { -1, -1 };
if (isStackEmpty())
{
return result;
}
result = path_stack[top];
top--;
return result;
}
// peek (pop과 유사하지만 실제로 pop은 하지 않고 맨 위의 값을 보기만 함.)
struct COORD peek(){
struct COORD result = { -1, -1 };
if (isStackEmpty())
{
return result;
}
result = path_stack[top];
return result;
}
// 길찾기 관련 함수
// 좌표 _c를 방문했었는지 판단
// 했었으면 1 아니면 zero
int checkVisited(struct COORD _c){
for (int i = 0; i <= visitedIndex; i++)
{
if (visited[i].col == _c.col && visited[i].row == _c.row)
{
return 1;
}
}
return 0;
}
void addToVisited(struct COORD _c){
// 있는지를 검사한다.
// 없으면 추가한다. 이때 인덱스를 먼저 증가시킨다.
if (checkVisited(_c) == 0){
visitedIndex++;
visited[visitedIndex] = _c;
}
}
// _c가 _dst와 같은지 판단.
// 같으면 non-zero를 반화, 아니면 0을 반환
int checkDestination(struct COORD _c, struct COORD _dst){
return (_c.row == _dst.row && _c.col == _dst.col);
}
// _c가 영역 내에 있으면 1, 아니면 0
int isWithinMap(struct COORD _c){
return ((_c.row >= 0) && (_c.row < size) && (_c.col >= 0) && (_c.col < size));
}
int isWall(struct COORD _c){
return (1 == maze[_c.row][_c.col]);
}
// _c를 기준으로 갈 수 있는 좌표 1곳을 반환
// 만약 없으면 (-1, -1) 반환환
struct COORD findWhereToGo(struct COORD _c){
// 체크할 방향을 저장하는 변수
struct COORD target;
// 1. 지도 영역 내인가?
// 2. 벽인가?
// 3. 가본 적 있나?
// 위
target.row = _c.row - 1;
target.col = _c.col;
if (isWithinMap(target) == 1 && isWall(target) == 0 && checkVisited(target) == 0)
{
return target;
}
// 아래
target.row = _c.row + 1;
target.col = _c.col;
if (isWithinMap(target) == 1 && isWall(target) == 0 && checkVisited(target) == 0)
{
return target;
}
// 왼쪽
target.row = _c.row;
target.col = _c.col - 1;
if (isWithinMap(target) == 1 && isWall(target) == 0 && checkVisited(target) == 0)
{
return target;
}
// 오른쪽
target.row = _c.row;
target.col = _c.col + 1;
if (isWithinMap(target) == 1 && isWall(target) == 0 && checkVisited(target) == 0)
{
return target;
}
target.row = -1;
target.col = -1;
return target;
}
// _s에서 _d까지 경로를 출력하는 함수
void findPath(struct COORD _s, struct COORD _d, struct COORD _wall){
// 현재 위치를 설정
struct COORD current = _s;
// 출발 좌표 저장
addToVisited(current);
while(1)
{
// 현재 위치에서 가는 곳을 찾는다.
struct COORD whereToGO = findWhereToGo(current);
if (whereToGO.row != -1 && whereToGO.col != -1)
{ // 갈 곳이 있음
push(current); // 경로를 저장해 둔다.
current = whereToGO;
addToVisited(current);
if (checkDestination(current, _d) == 1)
{
// 도착.
return;
}
}
else
{ // 갈 곳이 없음
while (1)
{
// top_coord <= stack의 맨 위에 있는 곳을 peek
struct COORD top_coord = peek();
// top_coord (-1, -1) : stack이 비었음... 경로 없음
// 더 이상 돌아갈 곳이 없음. 프로그램 종료.
if (top_coord.row == -1 && top_coord.col == -1)
{
maze[_wall.row][_wall.col] = 0; // 벽 지우기
wallcount--;
failcount++; // 실패 카운트
return;
}
whereToGO = findWhereToGo(top_coord);
if (whereToGO.row == -1 && whereToGO.col == -1)
{
// findWhereToGo(top_coord) => (-1, -1)
// 이 좌표는 도움이 안됨. 더 이전으로 가야함. 이 좌표는 버림
pop(); // top_coord를 날려버림.
}
else
{
// findWhereToGo(top_coord) => 유효한 좌표 찾기 성공
// current = whereToGo
// push가 필요 없음, 아직 top_coord가 스택에 존재하기 때문.
// addToVisited(current)
current = whereToGO;
addToVisited(current);
break;
}
}
}
}
}
// 벽 생성 관련 함수
// 생성된 벽이 중복인지 확인. 같은 벽이면 1, 아니면 0
int check_create_wall(struct COORD _wall){
if (maze[_wall.row][_wall.col] == 1){
return 1;
}
else
{
return 0;
}
}
// 랜덤한 위치에 벽을 하나 생성.
struct COORD create_wall(){
struct COORD wall;
// 0 ~ size -1 까지 중에 랜덤
wall.row = rand() % size;
wall.col = rand() % size;
while (1)
{ // 이미 생성된 벽이거나 출발 위치이거나 도착 위치인 경우, 재생성.
if (check_create_wall(wall) == 1 || (wall.row == 0 && wall.col == 0) || (wall.row == size - 1 && wall.col == size - 1))
{
wall.row = rand() % size;
wall.col = rand() % size;
}
else
{ // 벽 생성
maze[wall.row][wall.col] = 1;
wallcount++;
break;
}
}
return wall;
}
// 미로 보여주기
void show_maze(){
for (int i = 0; i < size; i++)
{
for (int j = 0; j < size; j++)
{
if (maze[i][j] == 1)
{ // 벽 그리기.
printf("⬛");
}
else if (maze[i][j] == 0)
{ // 통로 그리기.
printf("⬜");
}
else if (maze[i][j] == 3)
{ // 경로 그리기.
printf("▪️");
}
}
printf("\n");
}
printf("\n");
return;
}
// 0과 1로 미로 보여주기
void show_bit_maze(){
for (int i = 0; i < size; i++)
{
for (int j = 0; j < size; j++)
{
printf("%d ", maze[i][j]);
}
printf("\n");
}
printf("\n");
return;
}
// 경로 보여주기
void show_path(){
for (int i = 0; i <= top; i++)
{ // 경로를 3으로 표시
maze[path_stack[i].row][path_stack[i].col] = 3;
}
show_maze();
return;
}
// 미로 만들기
int create_maze(struct COORD _s, struct COORD _d){
while ((size * size * 7) / 10 >= wallcount)
{
// 스택, 배열 초기화
top = -1;
visitedIndex = -1;
struct COORD wall = create_wall();
findPath(_s, _d, wall);
// 최소이동횟수( size + size - 1 )을 제외한 벽의 최대수를 충족하고 충분히 많이 실패한 경우.
// 조건을 충족하는 미로를 만들 수 없는 경우.
if ((failcount > size * size * size) && (wallcount == (size * size) - (size + size - 1)))
{
printf("경로를 찾을 수 없습니다.\n");
printf("미로를 완성할 수 없습니다.\n");
return 0;
}
else if ((failcount > size * size * size))
{ // 7이나 8인 경우, 경로가 'ㄷ'라 처럼 꼬여서 최소 이동횟수로 움직이지 않는 경우.
// 최소 이동 횟수가 아니면 7일 때, 70%의 벽이 생성될 수 없음. 재생성.
// 미로 초기화 모두 0으로
for (int i = 0; i < size; i++)
{
for (int j = 0; j < size; j++)
{
maze[i][j] = 0;
}
}
failcount = 0;
wallcount = 0;
printf("경로를 재탐색합니다.\n");
}
}
return 1;
}
int main() {
int n = 0;
printf("미로의 크기를 정해주세요.(n >= 5, n <= 30)\n");
scanf("%d", &size);
// 입력 크기 제한
while (size < 5 || size > 30)
{
printf("잘못된 크기입니다.(n >= 5, n <= 30)\n");
printf("미로의 크기를 정해주세요.(n >= 5, n <= 30)\n");
scanf("%d", &size);
}
struct COORD start_point = { 0, 0 }; // 시작지점
struct COORD dest_point = { size - 1, size -1 }; // 종료지점
// 미로와 문제풀이에 사용할 스택과 배열 동적할당.
maze = (int **)malloc(size * sizeof(int *));
for (int i = 0; i < size; i++)
{
maze[i] = (int *)malloc(size * sizeof(int));
}
path_stack = (struct COORD *)malloc(size * size * sizeof(struct COORD));
visited = (struct COORD *)malloc(size * size * sizeof(struct COORD));
// 랜덤 시드 값
srand(time(NULL));
// 미로 초기화 모두 0으로
for (int i = 0; i < size; i++)
{
for (int j = 0; j < size; j++)
{
maze[i][j] = 0;
}
}
// 미로 생성
if (create_maze(start_point, dest_point))
{ // 성공!
printf("(%d * %d)사이즈의 미로\n", size, size);
show_maze();
// 벽 생성 % 출력
double num = ((double)wallcount / (size * size)) * 100;
printf("벽 생성: %.2f \%\n", num);
// 경로 출력
for (int i = 0; i <= top; i++)
{
printf("( %d, %d )->\n", path_stack[i].row, path_stack[i].col);
}
printf("( %d, %d ) 도착!\n", size - 1, size - 1);
printf("0과 1로 된 미로를 보고싶다면 1을, 아니라면 2를 눌러주세요..\n");
scanf("%d", &n);
if (n == 1)
{
printf("0과 1로 이루어진 미로\n");
show_bit_maze();
}
printf("경로를 보고 싶다면 1을 종료는 2를 눌러주세요.\n");
scanf("%d", &n);
if (n == 1)
{
show_path();
}
}
else
{ // 실패
show_maze();
// 벽 생성 % 출력
double num = ((double)wallcount / (size * size)) * 100;
printf("벽 생성: %.2f \%\n", num);
printf("현재 미로에서 더 이상 벽을 추가할 수 없습니다.\n");
}
printf("아무 버튼을 입력해 종료해주세요.\n");
scanf("%d", &n);
// 동적할당 해제
for (int i = 0; i < size; i++)
{
free(maze[i]);
}
free(maze);
free(path_stack);
free(visited);
return 0;
}
동작 화면
초기화면(입력 대기)
잘못된 입력을 받은 경우
제대로 된 입력을 받은 경우(size = 7)
제대로 된 입력이지만 5나 6인 경우(size = 5)
0과 1로 이루어진 미로를 보고 싶은 경우( size = 7 )
경로를 보고 싶은 경우(size = 30)
댓글남기기